Autant que les termes anatomiques du mouvement, qui décrivent le mouvement effectué par un muscle, une terminologie unique est utilisée pour décrire l’action d’un ensemble de muscles.
Montage agoniste et antagoniste
Les muscles agonistes et les muscles antagonistes font référence aux muscles qui provoquent ou inhibent un mouvement.
Les muscles agonistes provoquent un mouvement par leur propre activation. Par exemple, le triceps brachii se contracte, produisant une contraction de raccourcissement, pendant la phase ascendante d’un push-up (extension du coude). Pendant la phase descendante d’une poussée, le même triceps brachial contrôle activement la flexion du coude tout en produisant une contraction d’allongement. Il s’agit toujours de l’agoniste, car tout en résistant à la gravité pendant la relaxation, le triceps brachii continue d’être le principal moteur, ou contrôleur, de l’action articulaire. Les agonistes sont également appelés de manière interchangeable » moteurs principaux « , car ce sont les muscles considérés comme principalement responsables de la génération ou du contrôle d’un mouvement spécifique.
Un autre exemple est le curl d’haltère au coude. Le groupe des » fléchisseurs du coude » est l’agoniste, se raccourcissant pendant la phase de soulèvement (flexion du coude). Pendant la phase d’abaissement, les muscles » fléchisseurs du coude » s’allongent et restent agonistes car ils contrôlent la charge et le mouvement (extension du coude). Tant pour la phase de soulèvement que pour la phase d’abaissement, les muscles « extenseurs du coude » sont les antagonistes (voir ci-dessous). Ils s’allongent pendant la phase de soulèvement des haltères et se raccourcissent pendant la phase d’abaissement des haltères. Il est important de comprendre ici qu’il est courant de donner un nom à un groupe de muscles (par exemple, les fléchisseurs du coude) sur la base de l’action articulaire qu’ils produisent pendant une contraction de raccourcissement (concentrique). Toutefois, cette convention de dénomination ne signifie pas qu’ils sont uniquement agonistes pendant le raccourcissement. Ce terme décrit généralement la fonction des muscles squelettiques.
Les muscles antagonistes sont simplement les muscles qui produisent un couple articulaire opposé à celui des muscles agonistes. Ce couple peut aider à contrôler un mouvement. Le couple opposé peut ralentir le mouvement – notamment dans le cas d’un mouvement balistique. Par exemple, lors d’un mouvement discret très rapide (balistique) du coude, comme le lancer d’une fléchette, les muscles triceps seront activés très brièvement et fortement (en « rafale ») pour accélérer rapidement le mouvement d’extension du coude, suivi presque immédiatement par une « rafale » d’activation des muscles fléchisseurs du coude qui décélère le mouvement du coude pour arriver à un arrêt rapide. Pour utiliser une analogie automobile, cela reviendrait à appuyer rapidement sur la pédale d’accélérateur, puis à appuyer immédiatement sur le frein. L’antagonisme n’est pas une propriété intrinsèque d’un muscle ou d’un groupe de muscles particulier ; c’est un rôle que joue un muscle en fonction du muscle qui est actuellement l’agoniste. Lors des actions articulaires lentes qui impliquent la gravité, tout comme pour le muscle agoniste (mentionné ci-dessus), le muscle antagoniste peut se raccourcir et s’allonger. Si l’on reprend l’exemple ci-dessus du triceps brachial pendant une poussée, les muscles fléchisseurs du coude sont les antagonistes au niveau du coude pendant la phase ascendante et la phase descendante du mouvement. Lors du curl avec haltères, les extenseurs du coude sont les antagonistes pour les phases de montée et de descente.
Paires agonistes-antagonistesEdit

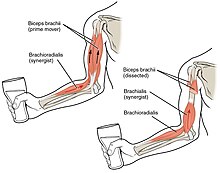
Les muscles antagonistes et agonistes se présentent souvent par paires, appelées paires antagonistes. Lorsqu’un muscle se contracte, l’autre se détend. Un exemple de paire antagoniste est le biceps et le triceps ; pour se contracter, le triceps se relâche tandis que le biceps se contracte pour lever le bras. Les « mouvements inversés » nécessitent des paires antagonistes situées sur les côtés opposés d’une articulation ou d’un os, notamment les paires abducteur-adducteur et fléchisseur-extenseur. Ces dernières sont constituées d’un muscle extenseur, qui « ouvre » l’articulation (en augmentant l’angle entre les deux os) et d’un muscle fléchisseur, qui fait l’inverse en diminuant l’angle entre deux os.
Cependant, les muscles ne fonctionnent pas toujours de cette manière ; il arrive que les agonistes et les antagonistes se contractent en même temps pour produire une force, selon le paradoxe de Lombard. De même, il arrive que lors d’une action conjointe contrôlée par un muscle agoniste, l’antagoniste soit légèrement activé, naturellement. Ce phénomène est normal et n’est pas considéré comme un problème, sauf s’il est excessif ou incontrôlé et perturbe le contrôle de l’action articulaire. C’est ce qu’on appelle la coactivation agoniste/antagoniste et elle sert à rigidifier mécaniquement l’articulation.
Tous les muscles ne sont pas appariés de cette manière. Un exemple d’exception est le deltoïde.
Action synergiqueEdit
Les muscles synergistes effectuent, ou aident à effectuer, le même ensemble de mouvements articulaires que les agonistes. Les muscles synergistes agissent sur les articulations mobiles. Les synergistes sont parfois appelés « neutraliseurs » car ils aident à annuler, ou à neutraliser, le mouvement supplémentaire des agonistes pour s’assurer que la force générée fonctionne dans le plan de mouvement souhaité.
Les fibres musculaires ne peuvent se contracter que jusqu’à 40 % de leur longueur entièrement étirée. Ainsi, les fibres courtes des muscles pennés sont plus adaptées lorsque la puissance plutôt que l’amplitude de contraction est requise. Cette limitation de l’amplitude de contraction affecte tous les muscles, et ceux qui agissent sur plusieurs articulations peuvent être incapables de se raccourcir suffisamment pour produire toute l’amplitude du mouvement à chacune d’entre elles simultanément (insuffisance active, par exemple, les doigts ne peuvent pas être complètement fléchis lorsque le poignet est également fléchi). De même, les muscles opposés peuvent être incapables de s’étirer suffisamment pour permettre un tel mouvement (insuffisance passive). Pour ces deux raisons, il est souvent indispensable d’utiliser d’autres muscles, appelés fixateurs ou synergistes, dans ce type d’action pour fixer certaines articulations afin que d’autres puissent être déplacées efficacement, par exemple, la fixation du poignet lors de la flexion complète des doigts en serrant le poing. Les synergistes sont des muscles qui facilitent l’action de fixation.
Il existe une différence importante entre un muscle synergiste aidant et un muscle synergiste vrai. Un muscle synergiste vrai est un muscle qui neutralise uniquement une action articulaire indésirable, alors qu’un synergiste aidant est un muscle qui neutralise une action indésirable mais qui aide également à l’action souhaitée.
Action neutralisante
On dit d’un muscle qui fixe ou maintient un os afin que l’agoniste puisse effectuer le mouvement prévu qu’il a une action neutralisante. Les ischio-jambiers en sont un bon exemple célèbre ; les muscles semi-tendineux et semi-membraneux effectuent la flexion du genou et la rotation interne du genou tandis que le biceps fémoral effectue la flexion du genou et la rotation externe du genou. Pour que le genou puisse fléchir tout en ne tournant pas dans un sens ou dans l’autre, les trois muscles se contractent pour stabiliser le genou pendant qu’il se déplace dans le sens souhaité.
Muscle compositeModification
Les muscles composites ou hybrides ont plus d’un ensemble de fibres qui remplissent la même fonction, et sont généralement alimentés par différents nerfs pour différents ensembles de fibres. Par exemple, la langue elle-même est un muscle composite composé de divers éléments comme les muscles longitudinaux, transversaux, horizontaux, dont les différentes parties innervées ont une alimentation nerveuse différente.
0 commentaire