Como os termos anatómicos de movimento, que descrevem o movimento feito por um músculo, uma terminologia única é usada para descrever a acção de um conjunto de músculos.
Agonistas e antagonistas Editar
Músculos agonistas e antagonistas referem-se a músculos que causam ou inibem um movimento.
Músculos agonistas causam um movimento através da sua própria activação. Por exemplo, o tríceps braquii contrai-se, produzindo uma contracção de encurtamento, durante a fase ascendente de uma flexão (extensão do cotovelo). Durante a fase de flexão para baixo, o mesmo tríceps brachii controla activamente a flexão do cotovelo, produzindo uma contracção de alongamento. Continua a ser o agonista, porque enquanto resiste à gravidade durante o relaxamento, o tríceps brachii continua a ser o principal impulsionador, ou controlador, da acção conjunta. Os agonistas são também intercambiavelmente referidos como “principais movimentadores”, uma vez que são os músculos considerados primariamente responsáveis pela geração ou controlo de um movimento específico.
Outro exemplo é o cotovelo dumbbell curl no cotovelo. O grupo “flexor do cotovelo” é o agonista, encurtando durante a fase de elevação (flexão do cotovelo). Durante a fase de descida, os músculos “flexor do cotovelo” alongam-se, permanecendo os agonistas porque estão a controlar a carga e o movimento (extensão do cotovelo). Tanto na fase de elevação como na de descida, os músculos “extensor do cotovelo” são os antagonistas (ver abaixo). Eles alongam-se durante a fase de elevação do haltere e encurtam durante a fase de abaixamento do haltere. Aqui é importante compreender que é prática comum dar um nome a um grupo muscular (por exemplo, flexores de cotovelo) com base na acção conjunta que produzem durante uma contracção de encurtamento (concêntrica). Contudo, esta convenção de nomenclatura não significa que sejam apenas agonistas durante um encurtamento. Este termo descreve tipicamente a função dos músculos esqueléticos.
Músculos antagonistas são simplesmente os músculos que produzem um torque articular oposto ao dos músculos agonistas. Este torque pode ajudar a controlar um movimento. O torque oposto pode retardar o movimento – especialmente no caso de um movimento balístico. Por exemplo, durante um movimento muito rápido (balístico) discreto do cotovelo, tal como lançar um dardo, os músculos tríceps serão activados muito breve e fortemente (num “estouro”) para acelerar rapidamente o movimento de extensão no cotovelo, seguido quase imediatamente por um “estouro” de activação aos músculos flexores do cotovelo que desacelera o movimento do cotovelo para chegar a uma paragem rápida. Para utilizar uma analogia automóvel, isto seria semelhante a pressionar rapidamente o pedal do acelerador e depois pressionar imediatamente o travão. O antagonismo não é uma propriedade intrínseca de um determinado músculo ou grupo muscular; é um papel que um músculo desempenha dependendo de qual músculo é actualmente o agonista. Durante acções articulares mais lentas que envolvem gravidade, tal como com o músculo agonista (mencionado acima), o músculo antagonista pode encurtar e alongar. Utilizando o exemplo acima do tríceps braquial durante uma flexão, os músculos flexores do cotovelo são os antagonistas no cotovelo durante a fase ascendente e descendente do movimento. Durante o enrolamento do haltere, os extensores do cotovelo são os antagonistas tanto na fase de elevação como na fase de descida.
Pares agonista-antagonistaEdit

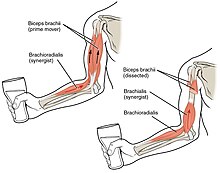
Os músculos antagonista e agonista ocorrem frequentemente em pares, chamados pares antagonistas. À medida que um músculo se contrai, o outro relaxa. Um exemplo de um par antagonista é o bíceps e o tríceps; para se contrair, o tríceps relaxa enquanto o bíceps se contrai para levantar o braço. Os “movimentos inversos” necessitam de pares antagónicos localizados em lados opostos de uma articulação ou osso, incluindo os pares abdutor-adutor e os pares flexor-extensor. Estes consistem num músculo extensor, que “abre” a articulação (aumentando o ângulo entre os dois ossos) e um músculo flexor, que faz o contrário, diminuindo o ângulo entre dois ossos.
No entanto, os músculos nem sempre funcionam desta forma; por vezes os agonistas e antagonistas contraem-se ao mesmo tempo para produzir força, conforme o paradoxo de Lombard. Também, por vezes durante uma acção conjunta controlada por um músculo agonista, o antagonista será ligeiramente activado, naturalmente. Isto ocorre normalmente e não é considerado um problema, a menos que seja excessivo ou descontrolado e perturbe o controlo da acção articular. A isto chama-se co-activação agonista/antagonista e serve para endurecer mecanicamente a articulação.
p>Nem todos os músculos são emparelhados desta forma. Um exemplo de uma excepção é o deltóide.
Acção sinergéticaEdit
Os músculos sinérgicos executam, ou ajudam a executar, o mesmo conjunto de movimentos articulares que os agonistas. Os músculos sinergéticos actuam sobre as articulações móveis. Os sinergéticos são por vezes referidos como “neutralizadores” porque ajudam a cancelar, ou neutralizar, o movimento extra dos agonistas para garantir que a força gerada funciona dentro do plano de movimento desejado.
Fibras musculares só podem contrair até 40% do seu comprimento totalmente esticado. Assim, as fibras curtas dos músculos pennatos são mais adequadas onde é necessária força em vez de alcance de contracção. Esta limitação na amplitude de contracção afecta todos os músculos, e aqueles que actuam sobre várias articulações podem não ser capazes de encurtar o suficiente para produzir toda a amplitude de movimento em todos eles simultaneamente (insuficiência activa, por exemplo, os dedos não podem ser totalmente flexionados quando o pulso também é flexionado). Do mesmo modo, os músculos opostos podem ser incapazes de se esticar o suficiente para permitir tal movimento (insuficiência passiva). Por estas duas razões, é muitas vezes essencial utilizar outros músculos, chamados fixadores ou sinérgicos, neste tipo de acção para fixar algumas das articulações para que outras possam ser movimentadas eficazmente, por exemplo, a fixação do pulso durante a flexão total dos dedos ao apertar o punho. Os sinergéticos são músculos que facilitam a acção de fixação.
Há uma diferença importante entre um músculo sinérgico de ajuda e um verdadeiro músculo sinérgico. Um verdadeiro músculo sinérgico é aquele que apenas neutraliza uma acção articular indesejada, enquanto que um sinérgico de ajuda é aquele que neutraliza uma acção indesejada, mas também auxilia com a acção desejada.
Neutralizer ActionEdit
Um músculo que fixa ou segura um osso para que o agonista possa realizar o movimento pretendido, diz-se que tem uma acção neutralizadora. Um bom exemplo famoso disto são os músculos do tendão; os músculos semitendinoso e semimembranoso realizam a flexão do joelho e a rotação interna do joelho enquanto que o femoris do bíceps realiza a flexão do joelho e a rotação externa do joelho. Para o joelho flexionar enquanto não roda em qualquer direcção, os três músculos contraem-se para estabilizar o joelho enquanto este se move da forma desejada.
Músculo compostoEditar
Músculo composto ou híbrido têm mais do que um conjunto de fibras que desempenham a mesma função, e são normalmente fornecidos por nervos diferentes para conjuntos diferentes de fibras. Por exemplo, a língua em si é um músculo composto constituído por vários componentes como músculos longitudinais, transversais, horizontais, com diferentes partes interiorizadas, com diferentes nervos de fornecimento.
0 comentários